Modèle équilibrage
|
|
|

Dézipper le fichier robot_inventor.zip et ouvrir Robot-meca.iam dans le dossier Robot-equilibrage .
|
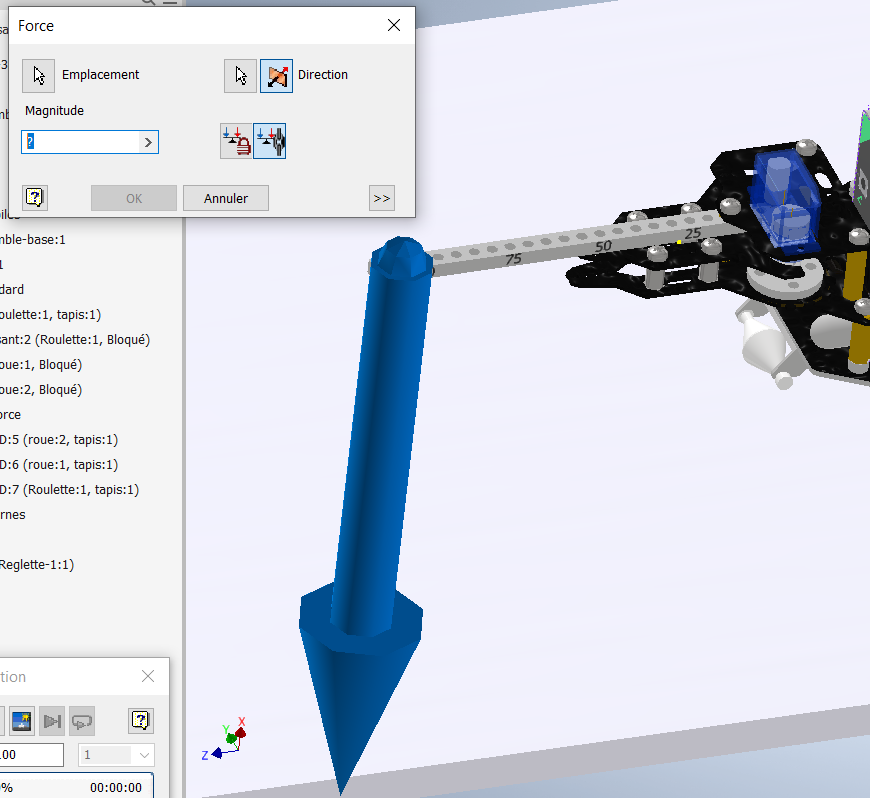
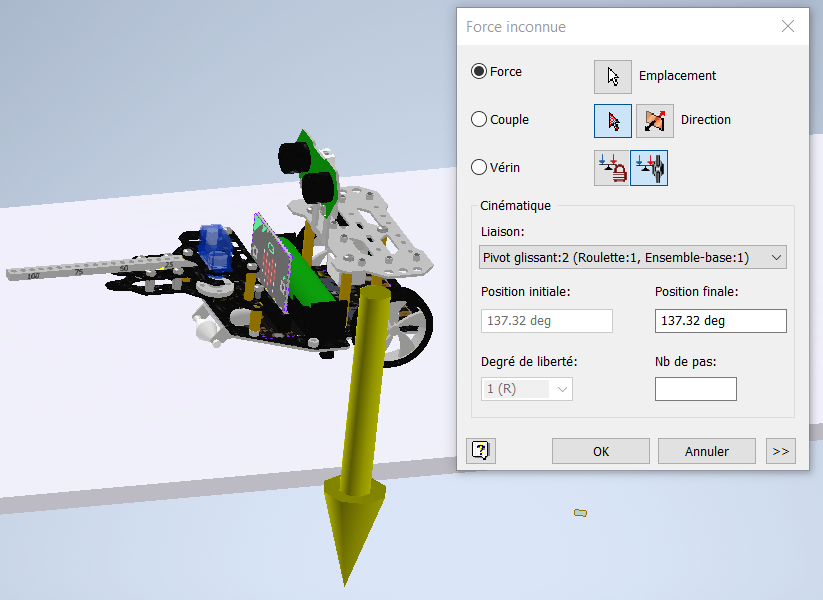
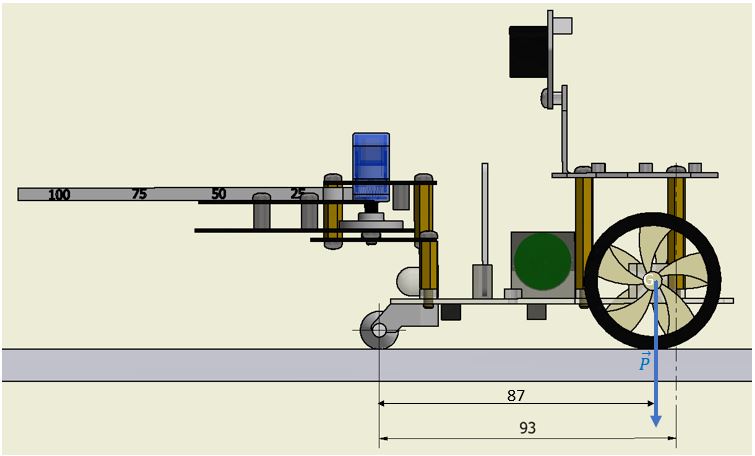
Evaluer à quelle distance le centre de gravité du colis sera situé (On prendra comme distance zéro la roue centrale).Charger le fichier Robot-meca.iam dans le dossier Robot-equillibrage. Faire "Environnements"- "Simulation dynamique". Installer la force |
|

|
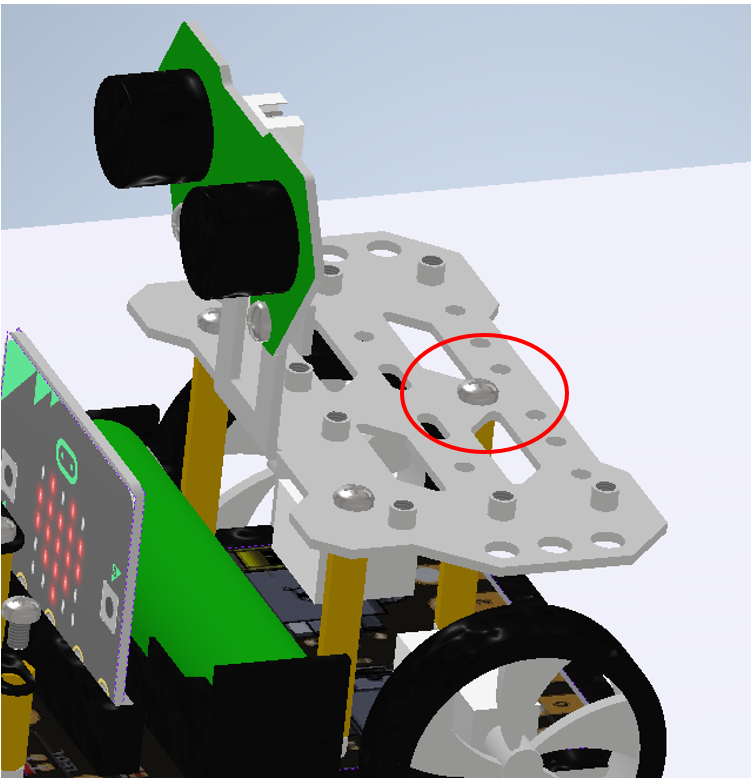
Installer une force inconnue sur la base arrière, la ou l'on considérera que le centre de gravité de la charge d'équilibrage passera.
Faire "Graphique de sortie" |
|
Created with the Personal Edition of HelpNDoc: Single source CHM, PDF, DOC and HTML Help creation