Modélisation
Objectifs
- Rechercher l'angle de commande pour chaque gobelet ;
- Rechercher la rampe de déplacement pour simulation ;
- Valider le comportement attendu sur un modèle multi-physique ;
- Instrumenter éventuellement pour récupérer des données utilisables dans la programmation.
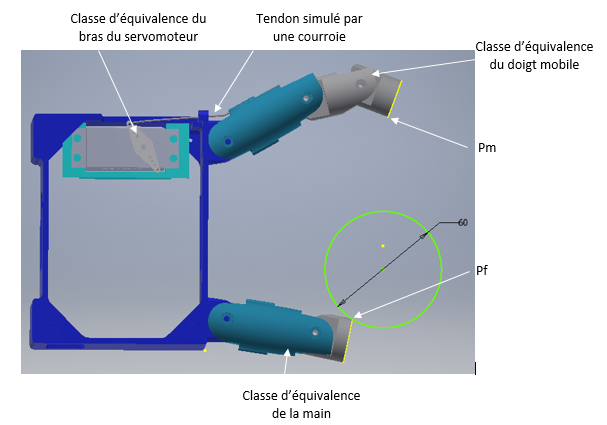
Réalisation du schéma cinématique de la pince
Certaines phalanges étant bloquées, réaliser le schéma cinématique de la pince en s'aidant du modèle Inventor.
Paramétrage du modèle volumique de simulation mécanique de la pince
On vous demande de paramétrer un modèle volumique de simulation mécanique de la pince sensible afin de l'adapter aux conditions réelles d'utilisation.
|
|
Les points d'expérience (modifiables) :
Télécharger les fichiers du modèle volumique de la pince : Projet_PinceSensible-Elève.zip |
Adaptation du modèle volumique de la pince à son gobelet
- Ouvrir le fichier d'assemblage du modèle volumique de la pince "1SI_Challenge-SimulatioElève.iam".
- Dans l'arbre de création :
- Editer l'esquisse
 en cliquant dessus.
en cliquant dessus. - Modifier le diamètre en fonction de celui du gobelet en votre possession.
- Fermer l'esquisse.
Modification de l'ouverture des mobilités articulaires à votre idée (que vous devrez être capable de justifier)
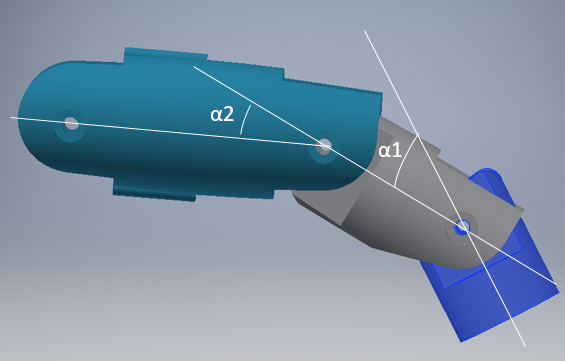
- Dans l'arbre de création :
- Développer (en double-cliquant) la classe d'équivalence fixe "CEdoigt mobile" et cliquer sur alpha 1 dans l'arbre de construction et modifier sa valeur en bas à gauche de l'écran.
- Faire de même pour "alpha 2" ;
- Finir par une validation en haut à droite.
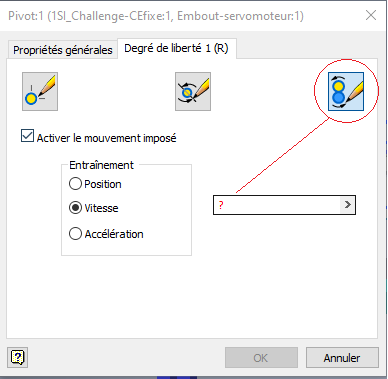
Mise en route de la simulation
- Cliquer sur Environnement - Simulation dynamique.
- Double-cliquer dans l'arbre de construction sur la liaison pivot 1 pour indiquer la vitesse mesurée lors des activités expérimentales par l’élève 2.
- Cliquer sur le lecteur de simulation pour faire un nouveau calcul.
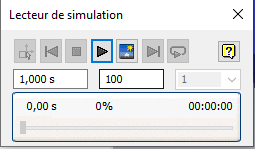
Analyse d'une situation:
Lancer le 
- Afficher la courbe des déplacements du doigt mobile.
- Repérer quels sont les deux moments d'étude intéressants sur cette courbe.
- Déterminer de quels angles devra tourner le servomoteur pour répondre aux exigences du cahier des charges.
- Conclure.
Créé avec HelpNDoc Personal Edition: Générateur de documentation complet