|

|
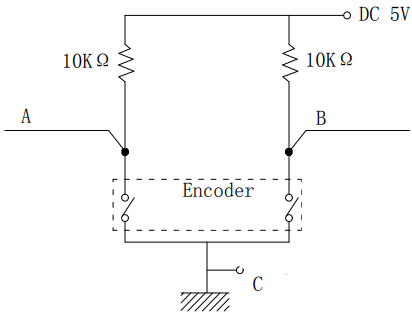
Tension: 3.3 - 5V
Angle de rotation 360°
20 positions par tour
Sortie du codeur incrémental : A et B
Sortie bouton poussoir : C
Datasheet EC11
|
|
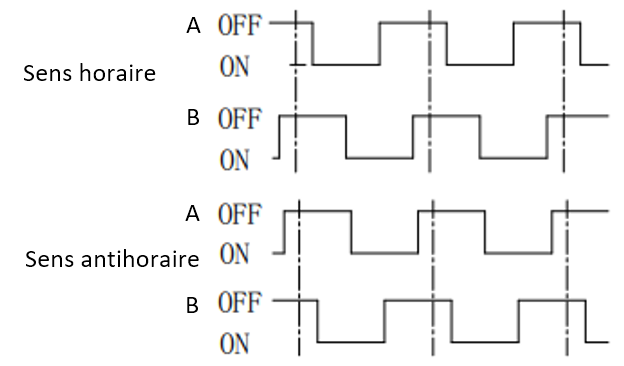
Les traits verticaux indiquent les positions fixes.
|
|
|
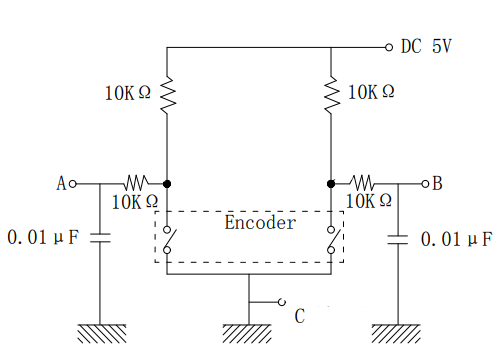
Circuit RC de filtrage conseillé
|
|
|
Arduino Uno Rotary Encoder SEN0235 EC11 DFROBOT, codeur rotatif, codeur incrémental
Programme qui compte ou décompte le positions
|
int codeurPinA = 2;
int codeurPinB = 3;
int bpPin = 4;
volatile long codeurValeur = 0;
void setup() {
Serial.begin (9600);
pinMode(codeurPinA, INPUT);
pinMode(codeurPinB, INPUT);
pinMode(bpPin, INPUT);
digitalWrite(codeurPinA, HIGH); // activation résistance de pullup
digitalWrite(codeurPinB, HIGH); // activation résistance de pullup
//appel de la fonction fdA lors d'un front descendant sur pinA
attachInterrupt(0, fdA, FALLING); // interruption 0 (pin 2)
//appel de la fonction fdB lors d'un front descendant sur pinB
attachInterrupt(1, fdB, FALLING); // interruption 1 (pin 3)
}
void loop(){
if(digitalRead(bpPin)==0){
Serial.println("Action sur BP !");
codeurValeur = 0 ;
}
Serial.println(codeurValeur);
delay(1000);
}
void fdA(){
if (digitalRead(codeurPinB) == 1) {
codeurValeur += 1 ;
}
}
void fdB(){
if (digitalRead(codeurPinA) == 1) {
codeurValeur -= 1 ;
}
}
|
Créé avec HelpNDoc Personal Edition: Créer des fichiers d'aide pour la plateforme Qt Help