|
|
|
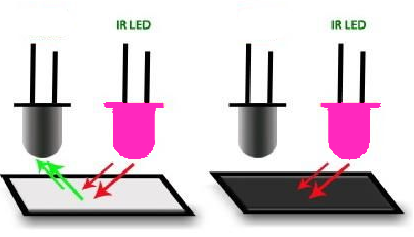
Ce capteur est constitué :
- d'une LED infrarouge et d'un photo-transistor pour détecter couleur
- d'une LED rouge pour signaler la présence de blanc
|
Couleur
|
Sortie
|
LED rouge
|
|
blanc
|
0
|
allumée
|
|
noire
|
1
|
éteinte
|
Le caopteur envoie un signal haut lorsqu'il détecte la ligne noire.
|
La distance de détection s'ajuste de 1,5 à 5 cm avec le potentiomètre situé au dos du capteur.
Arduino Uno Line Finder Grove
Programme qui allume la LED 1 lors de présence du noir sous le capteur
|
const int cptDrPin = 7; //capteur droit connecté à la broche 7
const int led1Pin = 3; //LED 1 connectée à la broche 3
int cptDr; //variable qui stocke l'état logique (0 ou 1) du capteur droit
void setup() {
pinMode(led1Pin, OUTPUT); //configure la broche 3 en sortie
pinMode(cptDrPin, INPUT); //configure la broche 7 en entrée
}
void loop() {
//lecture de l'état de la broche 7 et stockage de l'information dans la variable cptDr
cptDr = digitalRead(cptDrPin);
if (cptDr == HIGH) {
digitalWrite(led1Pin, HIGH);
}
else {
digitalWrite(led1Pin, LOW);
}
}
|
Créé avec HelpNDoc Personal Edition: Créer facilement des fichiers Qt Help