Accéléromètre gyroscope MPU6050
|
|
|
Ce module I2C est basé sur un MPU6050 associant un accéléromètre 3 axes et un gyroscope 3 axes. |
|
|
Caractéristiques :
|
|
||
|
MPU-6000 and MPU-6050 Register Map and Descriptions (configuration I2C) |
|||
|
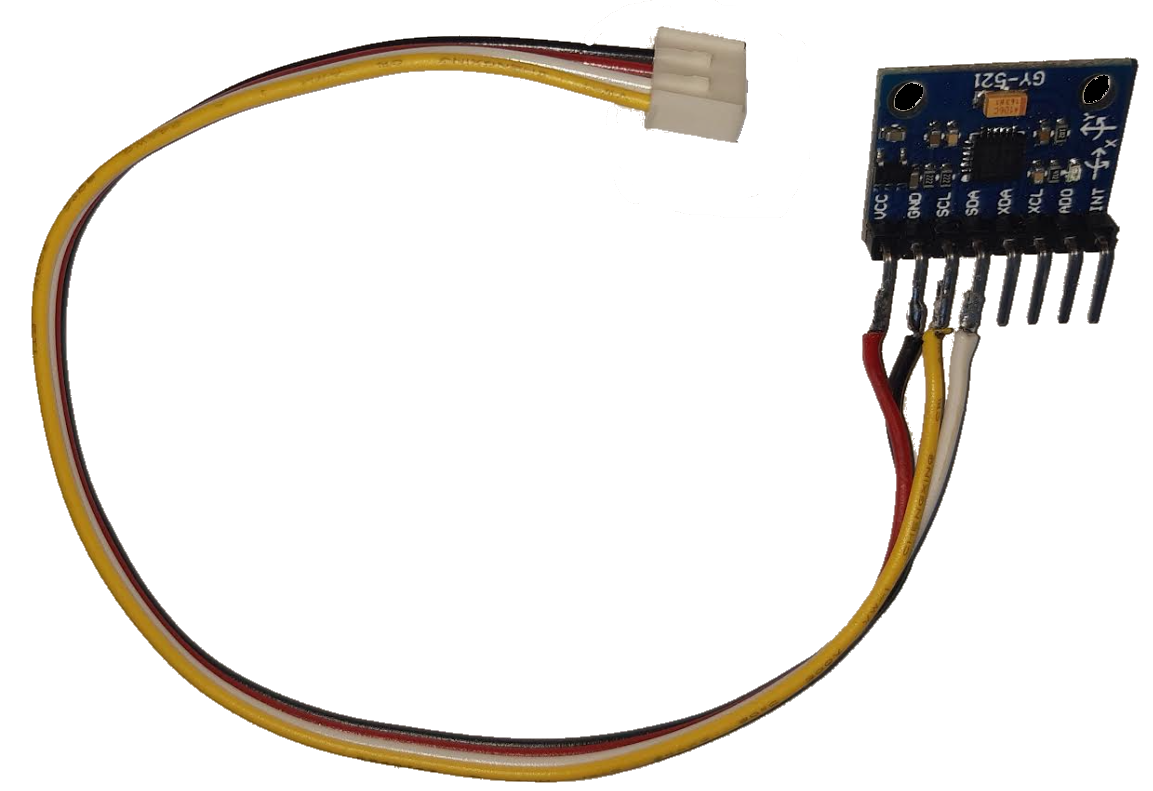
Raccordement du module MPU6050 sur sur le shield base Grove. Rouge : VCC Noir : GND Jaune : SCL Blanc : SDA |
|
Télécharger la bibliothèque : pi_pico_mpu6050.zip
Installer la bibliothèque sur la Raspberry Pi Pico (voir le tutoriel)
Raspberry Pi Pico MicroPython MPU6050 accéléromètre 3 axes et gyroscope 3 axes.
Programme qui permet de mesurer l'accélération, la vitesse angulaire et la température
|
|
Créé avec HelpNDoc Personal Edition: Générateur complet de livres électroniques ePub