Driver 2 moteurs MDDS30 Cytron
|
|
|
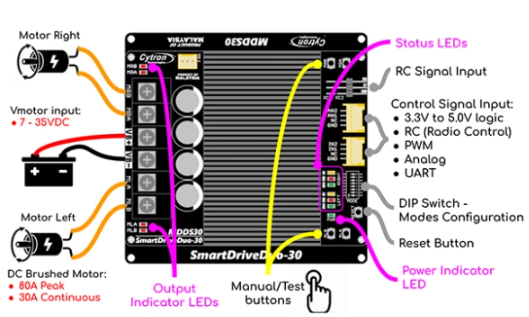
Cette carte est un module de puissance destiné à piloter 2 moteurs à courant continu. Elle se pilote en PWM, UART, via un potentiomètre ou via un signal RC.
Datasheet : mdds30.pdf Constructeur : cytron.io |

Exemple de configuration et de programmation
Raccordement sur UART1 (repère UART1 shield Grove)
Configuration des DIP switchs
- SW1=1, SW2=1, SW3=0 : Liaison série simplifiée
- SW4=0, SW5=1, SW6=1 : 9600 bits/s
- SW7=0, SW8=0 : batterie Lipo ou SW7=1 SW8=0 : batterie plomb
Raspberry Pi Pico MicroPython driver 2 moteurs Cytron MDDS30
Programme pour commander indépendamment un moteur
|
|
Créé avec HelpNDoc Personal Edition: Découvrez la puissance et la simplicité de l'interface utilisateur de HelpNDoc